
Introduction — Why this matters now
Have you ever wondered why some electric systems whisper while others roar? Recent field surveys show small electric systems can lose 10–30% of power to heat and friction, and that gap costs users time and money. In many of those setups, the electric motor is the single biggest culprit behind wasted energy and noisy operation (I see this all the time in workshops and test benches).
We want to cut through the jargon and give you practical sense: what makes a motor efficient, where losses hide, and — most importantly — how to choose the right design for your use. Ready to compare real options and make smarter picks? Let’s get to the heart of it.
Deep Dive: Why many traditional designs fail
I’ll start bluntly: many classic motor solutions were designed for different constraints. Older brushed motors tolerated rough commutation and crude mechanical contacts. Modern users, though, demand quieter torque, longer life, and tight control — and that’s where hidden pain shows up. For a clearer look, consider the move to a brushless electric motor early in a product redesign. Brushless designs reduce brush wear, cut sparking, and improve heat management. They also change the spec game — torque density, controller complexity, and inverter efficiency suddenly matter more.
Technically speaking, losses come from several buckets: copper I2R loss in windings, magnetic hysteresis, friction in bearings, and inefficiencies in the power electronics (inverter switching and pulse-width modulation). Commutation strategy and back-EMF shape control torque ripple. Hall sensors or encoder feedback affect controller timing. In short: you can’t fix motor noise and short runtime by swapping out batteries alone; you must look at controller tuning, thermal paths, and mechanical damping. Look, it’s simpler than you think — but it takes the right checklist to spot the weak links. — funny how that works, right?
What common pain points do users actually feel?
Users report three clear frustrations: overheating under load, unpredictable torque at low RPM, and high maintenance. Overheating often points to poor winding design or inadequate cooling. Low-RPM torque problems usually stem from controller mapping or insufficient torque constant (Kt). High maintenance often traces back to brushes, poor seals, or cheap bearings. I’ve fixed many customer headaches by targeting these specific flaws rather than chasing broad specs.
Looking Forward: New principles for cleaner, stronger drives
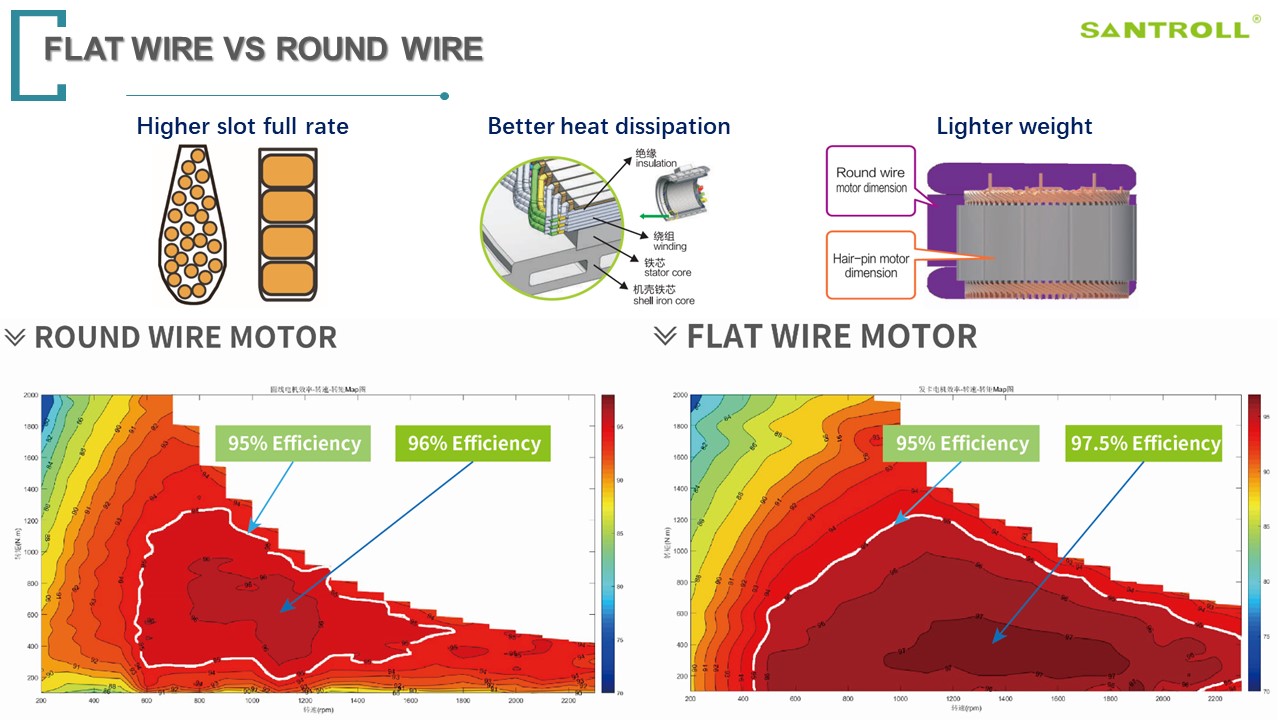
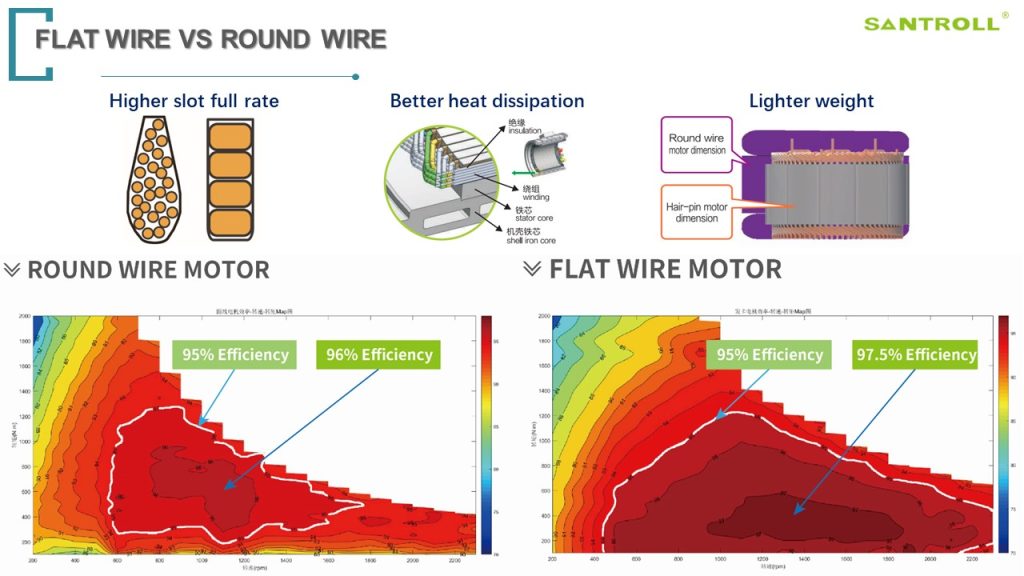
Moving ahead, the most promising gains come from pairing better motor topologies with smarter electronics. I’m talking about improved PM (permanent magnet) rotor designs, better thermal paths in the stator core, and wide-bandgap semiconductor inverters that lower switching losses. These principles let a motor keep more of its input power as useful torque rather than heat. When you combine a refined PMSM (permanent magnet synchronous motor) with an optimized controller, you get tighter speed control, less audible noise, and better efficiency curves across the operating range.
For marine and light-vehicle use, this matters a lot. Consider electric boat motors: they benefit from careful torque mapping and waterproofed housings, plus focused cooling strategies — water jackets, forced air, or conduction to the hull. Designers should also watch for back-EMF shape and cogging torque; both influence vibration and acoustic signature. When I evaluate a new design, I check thermal rise curves, inverter loss maps, and torque ripple numbers. These metrics tell me whether the system will behave in the real world — not just on paper. — and yes, it’s messy sometimes.
What’s Next: Practical steps and metrics
To move from concept to reliable product, prioritize these three evaluation metrics: 1) Continuous torque at target ambient temperature (do not rely on short bursts), 2) Power-conversion efficiency across the expected duty cycle (measure at real-world loads), and 3) Thermal resistance from winding to ambient (how quickly heat leaves the core). I recommend bench testing each motor with an actual controller and the expected load profile. Simulations help, but hands-on testing surfaces hidden issues fast.
In closing, I’ve seen smart changes deliver measurable gains: lower operating temps, longer runtime, and fewer field failures. If you want dependable performance, focus less on peak numbers and more on matched systems — motor, inverter, and mechanical integration. I’m convinced the best results come from thoughtful pairing and honest testing. For reliable parts and application guidance, check the library and product pages from Santroll, and then test with real loads before you finalize your design.